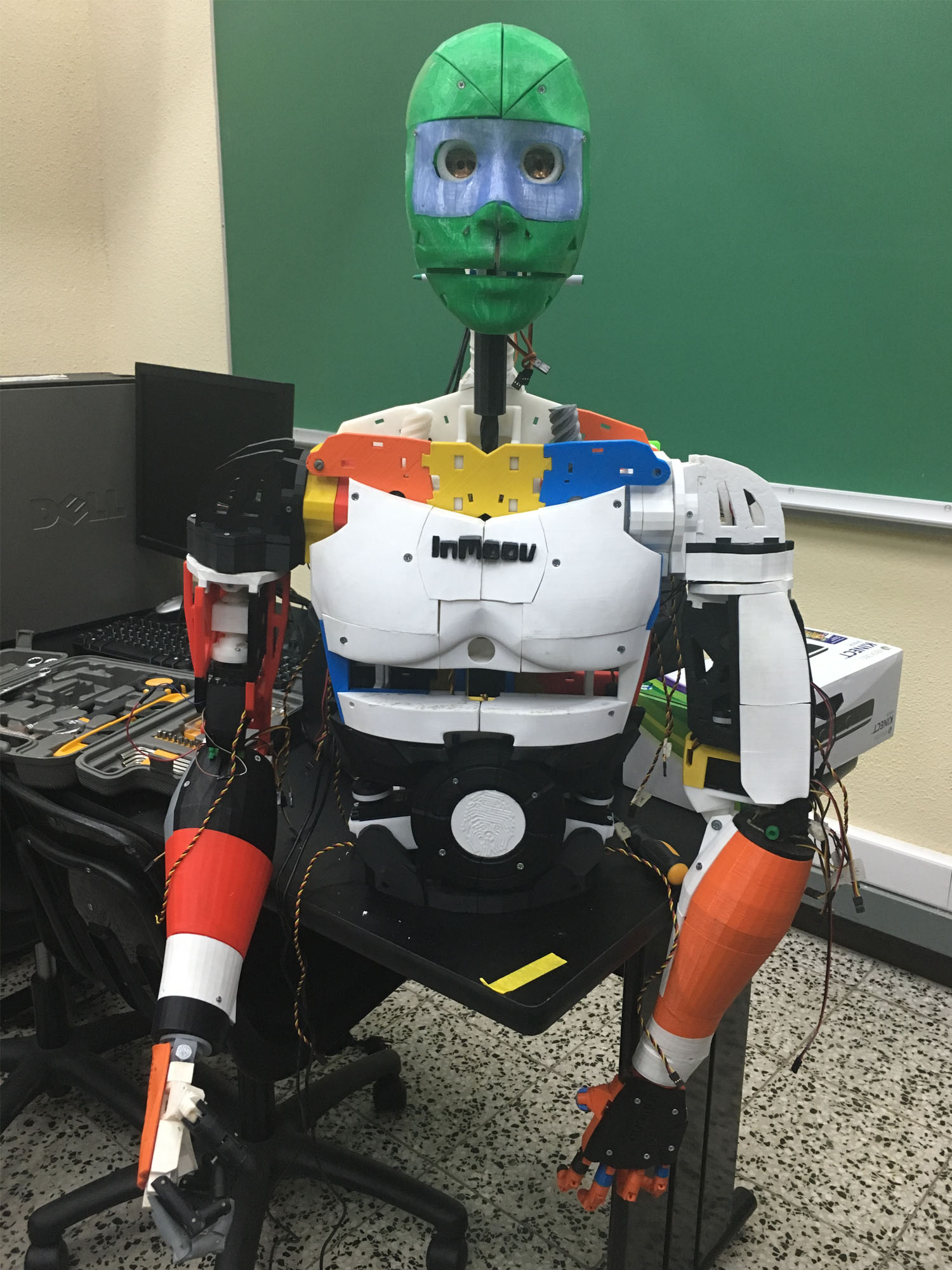
Leonardo GreenMoov
Leonardo GreenMoov is a 3D printed telepresence robot, based on the InMoov. Its movements are controlled by an Oculus Rift DK2 and a Leap Motion.
Status: As of January, 2016 the project is now managed by the Turing Lab.
Description
Leonardo GreenMoov is a telepresence robot with 3D printed parts based on the InMoov project by Gael Langevin. The objective of the project is giving the user immersion, through intuitive controls.
The head of the robot is controlled by an Oculus Rift DK2. The orientation of the headset is read and used to control the servo motors in the neck of the robot, so it can replicate the head movements of the user. The robot has two cameras as eyes, the video stream captured by the cameras is projected to the screen of the headset.
The movements of the user’s arms are tracked by a Leap Motion and this information is used to control the arms of the robot. By the time that Leonardo was in our lab, it only had one arm.
In January, 2016, the project was transfered to Turing Lab.